一、概述
1.1用途
窄波平板测速雷达是拥有完全自主知识产权的道路车速检测雷达,利用多普勒原理检测最快或者回波最强的车辆,实现对道路车辆速度的实时检测,并通过通讯接口把这些信息传输回来,为实施智能交通管理提供所需交通信息。
1.2描述
雷达为一种测速雷达设备,其工作原理为雷达所发射的高频信号照射在其作用范围内的移动目标反射时改变频率值(多普勒效应)。这种多普勒频移正比于移动目标的速度。
机动车雷达测速仪的主要特性为狭窄的辐射场型,保证狭窄的探测区域。被监控的目标车进入狭窄的探测区域之后,雷达测速仪发送触发信号,通过RS-232和RS485通讯协议与外部控制设备(计算机)连接。
测速雷达产生中心频率24Ghz的电磁波发射出去,目标回波和发射机直接耦合过来的信号加到接收机混频器内。在微波传播到目标并返回天线的这段时间内发射机频率较之回波频率已经有了变化,因此在混频输出端就出现了差频电压,后者经放大滤波后进入数字信号处理单元。由于差频电压的频率与目标的速度有关,所以经数字信号处理后就可以得到车辆的速度。

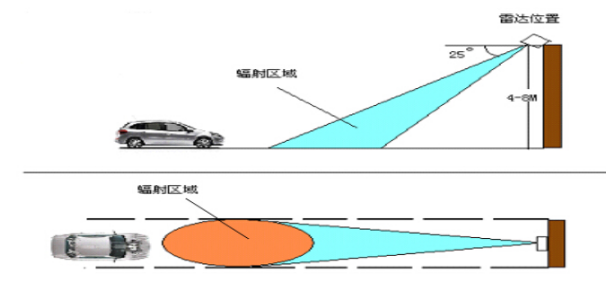
测速雷达波束对比
测速雷达原理示意图如上图所示。如果测量车速,安装于道路的正上方发射出在平行于车道方向均具有一定张角(发射角和方位角)的微波波束在路面投影出椭圆形微波“阴影”,微波束经路面和车道上的车辆反射后被雷达接收,通过混频产生差频信号,由于差频信号频率与车速相关,而信号强度与车辆是否存在相关,这样通过一定的数字信号处理便可以得到该车的速度信息。雷达发射波束角度为水平界面不大于 5°;垂直界面不大于 6°,投影到地面的监测范围为长度2m~4m,宽度不大于2m,检测范围占据监测车道的 2/3,因此雷达只对监测车道的车辆速度进行检测,对相邻车道的车辆不检测。
测速雷达采用的是中心频率为24GHz的微波信号,因此具有高频微波的所有特性。
综合来说主要有以下特点:
Ø 自主研发,可根据需求更改数据输出接口和协议;
Ø 安装方便,维护简单。测速雷达可以侧向安装于道路边,也可以在车内用支架支撑,作为便携设备用于测量车速,也可以安装在车道的正上方;
Ø 在恶劣气候条件下性能同样出色。微波雷达不受风、雨、雾、冰雹等影响。
与其他测速雷达相比,测速雷达具有以下的优点:
1) 中心频率24GHz。这是自由使用频率,也符合ISM及欧盟关于车流量检测雷达的标准;
2) 有两种类型的检测,车速最快模式和雷达回波最强模式;
3) 在恶劣的环境下仍可以正常工作,具备自检功能;
4) 结构是防水抗撞机箱,包含高频发射器、微处理器和数据处理交换电路板,全部安装于密封外壳内。
5) 用于连同外围设备同时工作,通讯通道用RS-232 和 RS-485。
1.3技术指标
1.3.1基本参数
►规格参数
天线类型:平板型微带阵列天线
工作频率:24.15GHz
频率偏离误差:≤ ±45 MHz
天线波束宽度: 4°×6°
发射功率:5mw
工作温度大于:-20℃~+60℃
工作湿度范围:5%RH~95%RH
测速范围:常规版(5~ 250)km/h
测速准确度:-1km/h内
反应时间:26ms
方向信息:有
电源:12VDC
功耗:≤2.5 瓦
雷达传感器
1.3.2检测精度和范围
当使用RS485通信时,精度为1km/h;
当采用RS232通信时,精度为0.1km/h,测量范围5~250km/h;。
1.3.3雷达接口
与外部设备的连接和电源的供给通过多线头连接进行,包括:
RS-232 连接器,传输速率为 9600 bit/s (串口,3芯), 用于测速仪控制以及向外部设备输出被测车辆信息;
RS-485连接器,传输速率为 9600 bit/s (串口,2芯), 用于测速仪控制以及向外部设备输出被测车辆信息,以及参数设置;
雷达电源 (2芯);

1.4应用领域
- 测速雷达常规版主要适合于单车道精确测量车速并定位的应用场合。如:
- 便携式移动电子警察测速雷达
- 城市卡口及定点路段监控系统
- 高速公路、快速路交通监控系统
- 大范围的交通监控网络

低速测速雷达测火车缓行速度
二、安装
2.1雷达正式安装前的检验
雷达正式安装前用提供的软件完成检测。可以利用我们附送的软件;按照软件说明,将设备接好线通上电让其正常工作。
2.2安装环境
测速雷达的安装采用固定安装的形式。
- 环境空气温度在零下20℃~零上60℃范围内;
- 25C°下相对湿度98%;
- 震动200Hz, 小于2g
- 10ms 内撞击,小于5g
■ 电源要求
- 供电电压(直电),12V
- 测速仪耗用电流应不大于500 mA
■ 测速仪构造
外形尺寸(mm),不大于:宽度201、高度196、厚度53
■ 测速仪重量:不大于1公斤
三、调试及使用
测速雷达通过附带的配套软件能对雷达的参数进行设置以及对工作状态下的雷达进行控制。界面友好,实现了人机互动,即使对计算机或者雷达探测等相关知识不熟悉的情况下也能得心应手的使用,并可按用户需求进行修改。
3.1软件运行环境
操作系统:Windows
3.2软件安装
1. 雷达串口调试助手V3.1,软件下载链接:/wp-content/uploads/radarcom.zip
3.3软件使用说明
3.3.1 连接雷达
点击雷达配置软件中的打开串口,在“关闭串口”按钮为可用状态时证明打开串口成功,否则软件会提示打开串口失败。
软件下方为配置区域,上方分别为速度结果显示区域及配置状态输入。
3.3.2 配置参数
输入需要设置的命令参数,对于需要保存的参数,点击【保存配置】,成功后软件会提示配置成功。常规版需要做如下设置,低速定制版无需再设置。
1)打开【雷达调试串口助手V3.1.exe】
rs485
在以上软件串口设置选择对应的串口号,波特率选择9600,如果串口未打开,点击左下角打开串口,红色图标显示,则串口连接成功。软件下载链接:/wp-content/uploads/radarcom.zip
2)设置命令
设置步骤如图4所示,首先在【数据输入框】输入命令,如设置雷达双向测速,命令为:【csr03cag】,注意没有空格。
再点击【发送数据】按键,设置成功会在结果上输出【set ok】,表示设置成功,至此设置完成。
3)雷达灵敏度修改
■命令是:csr◇◇amp
说明:◇◇数值从00到99之间,数值越大,灵敏度越低。数值根据实际情况修改,一般建议在30-60之间。
4)设置雷达安装角度的方法
■雷达安装角度修改命令是:csr◇◇deg。
说明:这个角度,指的是测速仪测速方向和道路的一个角度。测速仪一般不会和道路平行,这样画面大,会拍到很多无关车辆,所以都会和道路成一定夹角,一般在30度以内,具体情况看使用条件。实际测速的角度和这个要设置的雷达角度相差太大,会造成实际速度和测到的速度相差很大。
◇◇数值从00到45之间,数值越大,灵敏度越低。数值根据实际情况修改,一般建议在20-30之间。
5)设置雷达测速方向
| 只测来向:csr01cag | 只测去向:csr02cag | 不分方向输出的来去向都测:csr03cag | 分方向输出的来去向都测:csr00cag |
四、故障排除
维修保养及常见故障判断
雷达测速仪为高灵敏度专业性应用产品,使用前轻仔细阅读使用说明书等技术文档。
使用本产品时轻注意配用符合电压要求的高品质直流电源,并独立供电以避免其他设备的串扰。
雷达正面为平板微波天线,使用时请勿遮挡。
存放和使用时应避免冲击和跌落,以免造成损坏,在户外使用时要做好适当的防雨和防雷措施。
RS232和RS485连接时请注意各自的定义。
雷达典型异常和自行诊断方法:
| 故障现象 | 一般故障排除方法 |
| 上电没有任何反应 | 1,雷达上电后,RS232没有接收到任何数据,请检查雷达串口线是否接牢,接线顺序是否正确,雷达电源正负极是否接对,雷达供电压(DC12V)电流(200ma左右)是否正常,RS485是否接对。 |
| 上电无法正常测速 | 1, 雷达上电后工作正常,通讯也正常,但是过车不测速。请检查雷达安装角度,对否对准目前车道,再检查雷达灵敏度是否在合适范围。
2, 雷达工作正常,但是连接摄像机后,摄像机不抓拍。 1) 检查雷达信号线和摄像机接口是否正确。 2) 检查雷达车速格式和摄像机的通讯协议是否匹配 3) 在摄像机软件上进行手动抓拍测试,还可以通过串口给摄像机发送1个信号模拟雷达触发,看看摄像机是否响应。 |
| 照片显示正常速度异常 | 1.检查雷达与摄像机的通讯协议是否匹配。
2.检查通讯电缆是否连接可靠,接线顺序是否正确,是否受到干扰。 3,检查雷达补偿角度修正值是否合理,角度修正值越大,雷达数值就会越大。 |
| 无车时有速度 | 检查雷达安装位置是否对准目标车道,避免受相邻车道车辆干扰。
如果都是在10km以下时,也行是F杆震动影响雷达测出低速值,如果都是异常高速的值,也行是雷达周围的电磁干扰,可以调整测速仪范围进行屏蔽,检查接地是否合理。 检查周围是否有强电磁干扰或选择物体干扰,如风扇等。 |
| 过车无速度 | 检查雷达安装角度,是否对准关心的车道。
检查雷达安装角度是否在合理范围。 检查雷达至目标距离是否在合理范围内。 检查雷达灵敏度是否设置过低。 |
| 接收乱码 | 1.检查通讯电缆是否正常连接,顺序是否正常。
2.检查通讯电缆是否受到严重干扰。 3.检查串口波特率是否设置正常。 |
| 漏车 | 1.检查雷达安装角度,是否对准目标车道。
2.检查雷达至目标距离是否在合理范围内。 3.雷达灵敏度是否设置过低。 |
附录1
雷达数据通讯协议
串口通信协议
Ø 与测速仪连接的RS232通信串口应有下列设置:
- 波特率 9600 比特/秒
- 停止位 1
- 数据位 8
- 奇偶校验 无
串口协议对应表格如下:
| 第1字节 | 速度值百位 | 0x30--0x39 |
| 第2字节 | 速度值十位 | 0x30--0x39 |
| 第3字节 | 速度值个位 | 0x30--0x39 |
| 第4字节 | 小数点 | . |
| 第5字节 | 小数点后一位 | 0x30--0x39 |
| 第6字节 | 回车换行 | 0x0d |
| 第7字节 | 0x0a | |
| 波特率9600 无校验 一个停止位 |
Ø RS485输出格式:
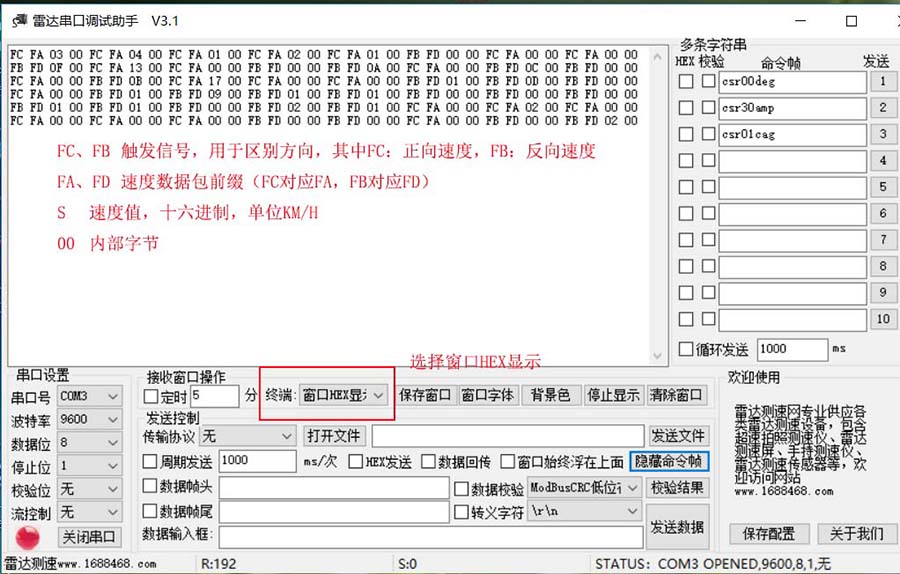
车辆在进入检测区域时触发并给出速度值,共计4个字节,
| FC、FB | 触发信号,用于区别方向,其中FC:正向速度,FB:反向速度 |
| FA、FD | 速度数据包前缀(FC对应FA,FB对应FD) |
| S | 速度值,十六进制,单位KM/H |
| 00 | 内部字节 |
目标信息格式
雷达测速是主动模式,不需要给雷达发送特殊命令,当有车辆经过检测区域(不区分来向和去向),并满足设定的限速及信号强度时,雷达会自动给出触发信号。
也就是测来向(反向)车辆。车辆在进入检测区域时,雷达就立刻给出触发信号及速度值
窄波测速雷达顶装效果
- 以下微信号
- 18758059365
-
