一、问题表现形式(注意,这款型号已经停产。):
在车速显示屏监测范围内,没有车辆行驶时,车速显示屏上会显示出莫名其妙的速度值,显示的这些速度值可能是间歇性的,也可能是连续不断的。而当车辆行驶时,可能又正常显示车速值,车辆过后,有开始乱显示速度……

二、问题分析:
车速显示屏利用的是雷达测速原理,会发射高频率的无线电波信号,当目标向车速显示屏运动时,反射信号频率将高于发射频率;反之,当目标远离车速显示屏而去时,反射信号频率将低于发射机频率。如此即可借由频率的改变数值,计算出目标与雷达的相对速度。

而车速显示屏使用的是宽波雷达,为的就是更多车道更远距离测出车辆速度,而监测范围大距离远,于是车速显示屏更容易受到干扰,只要干扰源影响到无线信号时,会造成车速显示屏误判,显示出相应的影响程度计算的错误速度值显示在车速显示屏上。
三、已知常见的干扰源
根据众多的案例所遇到的问题,已知的常见干扰有这几种:
3.1、无线电干扰引起的错误
当车速显示屏安装点,四周有较强的无线电波,会使雷达遭到干扰,比如空军部队等这样会有间歇性高强度无线信号的地方,以致雷达测速仪乱跳速度。再比如,距离较近的电信基塔,高压线,无线电干扰设备等,所以在运用雷达测速仪时,要尽量避开这些无线电波的干扰。
3.2、电机设备等造成的影响
已知遇到的电机设备,电扇类型的,如距离较近的运行中的空调外机,还有变电站等等。
四、处理方式及流程
五、设置雷达参数降低干扰
5.1、设置前准备:
◆以下图片为雷达串口调试器(需自配或自行制作,也可从我公司免费获得,但不包邮):

雷达串口调试线
图1
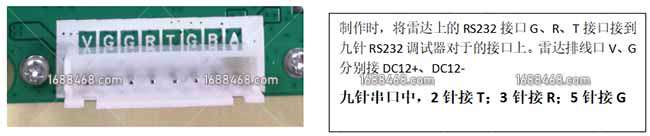
雷达接口图
按如下图3和电脑端连接:

雷达测速调试方式
5.2、下载设置软件及安装串口调试器驱动
◆以下图片为雷达串口调试工具,下载链接: /wp-content/uploads/radarcom.zip
◆如串口是CH340芯片,驱动下载链接:/wp-content/uploads/ch340.zip
也可通过驱动人生检测外设驱动并安装串口驱动。
5.3、设置步骤说明:
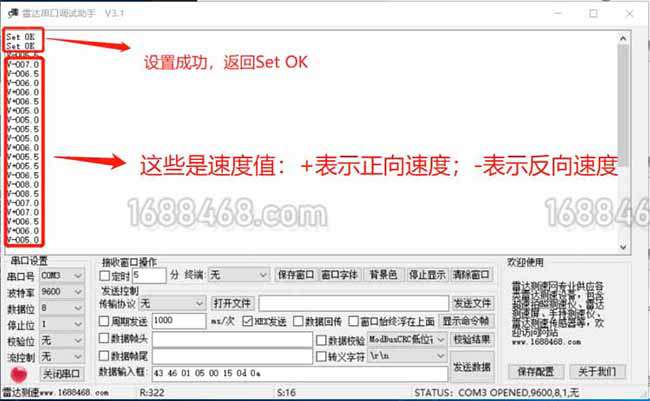
如图4,第一步:波特率9600,且左下角亮红色圆圈;第二步:数据输入框输入响应的命令;第三步:勾选HEX发送,第四步:【发送数据】。设置成功,信息栏则会返回set ok,否则设置不成功。
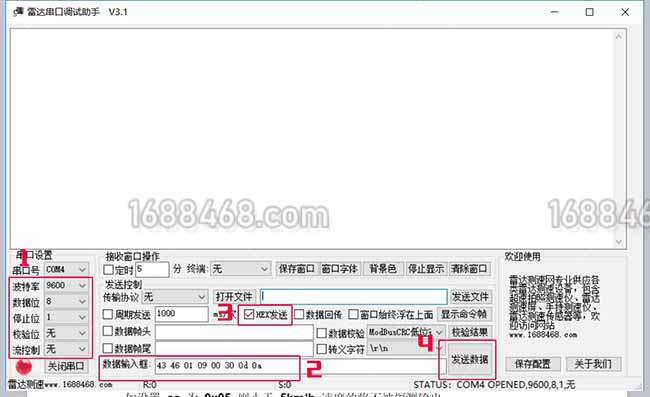
雷达串口调试助手说明图
雷达串口调试助手说明图
5.3、设置命令解析
5.3.1、如遇干扰,请先用命令A设置。
命 令 A : 43 46 01 09 00 cc 0d 0a
注 cc 为雷达灵敏度设置 可设置范围 00到 70 (出厂默认为 00) cc 值越小 灵敏度越高,即探测距离越远(但是抗干扰越差);
cc 值越大,灵敏度越低 即探测距离越近(但抗干扰就强)(如遇雷达附近有强电台发射天线或者雷达电源波纹系数较大导致的干扰 需要适当提高 cc 取值 提高抗干扰性能,请自行根据应用条件做取舍),一般CC设置为15,CC最大为十六进制的ff,当为ff时,几乎测不到车辆。
其中09为9km/h起测(算法为16进制),00为安装角度,如设置补偿角度为10°,则00改为0a
参考命令:43 46 01 09 00 50 0d 0a 说明:此命令起测速度9;安装角度0°,灵敏度:50
5.3.2、重点设置命令B
命 令B : 43 46 03 XU 00 00 0d 0a
XU 振动干扰之抗干扰系数 范围 00 ~ 70 (出厂默认为 00)
注: 振动干扰泛指小摆幅“来去”运动的目标(如喇叭发音或者雷达本身安装支架的振动又或者电风扇等的干扰,对无线电干扰也比较有效);X U 取值范围越大 抗振动摆幅越大,但容易漏掉短行程运动的目标 ,请自行根据应用场景调节做取舍。
比如:43 46 03 07 00 00 0d 0a 如果还不行,07改为09再设置,依然不行,再逐渐增大,如09改10。在设置时,还需关注是否对正常测速产生太大影响,干扰是避免了,但正常测速都不行了,那也是不行的。
5.3.3、附加参数,用于修改显示屏速度更新频率,如果需要设置,请看命令C,否则可以忽略!
命令C:43 46 02 Mod Time M/I 0d 0a
Mod 为 00 来去向目标都探测输出
Mod 为 01 仅来向目标探测输出
Mod 为 02 仅去向目标探测输出
Mod 为 03 计量测试模式(命令 B 之抗振动干扰系数对此模式无效)
Time 值越大雷达传感器每秒可测速输出次数越低(Time 出厂默认为 00,22FPS 左右响应)。如:43 46 02 00 ff 00 0d 0a 则为最大间隔,约1秒一次。
M/I 为 00 速度单位为千米/小时
M/I 为 01 速度单位为英里/小时
所以,如需速度刷新频率最快,请用命令:43 46 02 00 00 00 0d 0a
需要最慢的速度刷新频率,请用命令:43 46 02 00 ff 00 0d 0a
- 以下微信号
- 18758059365
-
